

Hace unos días (Control de tracción) explicaba aquí, cómo había decidido resolver definitivanente el control de tracción de mi maqueta, basándome en dos módulos CABCON00 y CABCON01, de los cuales el primero es único, y del segundo hay que utilizar uno por cada cantón, así que en mi caso, habrá que hacer ocho.
Bueno, pues he dedicado los últimos días a construir el CABCON00 y un par de CABCON01 para probar su correcto funcionamiento.
La verdad es que cada vez perfecciono más mi técnica para construir circuitos impresos, de manera que éstos últimos han quedado con un aspecto muy profesional. En la imagen siguiente vemos el CABCON00:

y a continuación vemos una de las placas CABCON01:

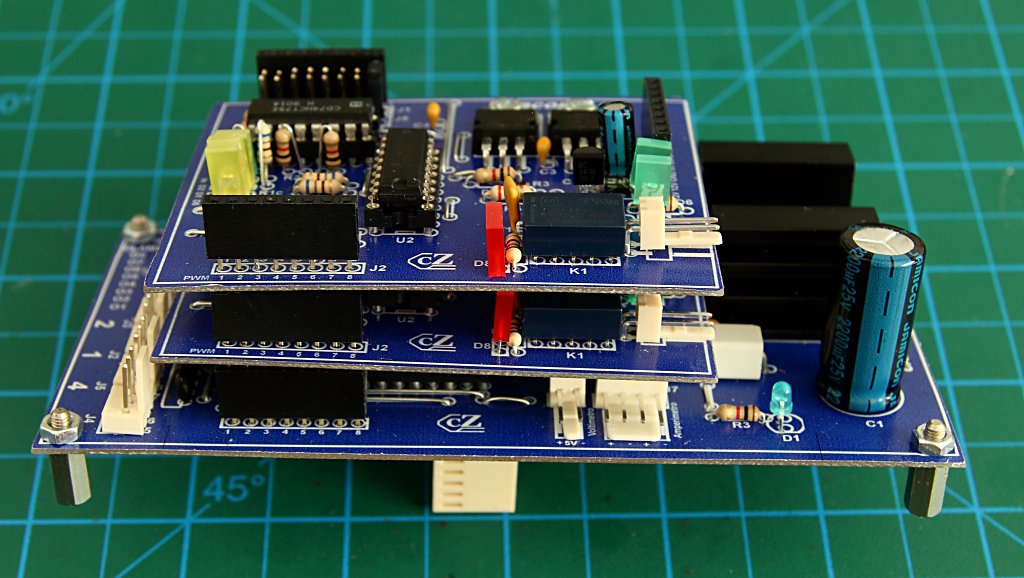
El resultado, para el caso de una placa CABCON00 y dos CABCON01 lo podemos ver en la siguiente imagen:
Naturalmente el siguiente paso era comprobar el funcionamiento de estas placas, lo cual por cierto es bastante complicado
En la imagen de cabecera, vemos el montaje para la prueba. En el ordenador el programa de comunicaciones, que permite enviar manualmente a la salida digital de la placa Velleman cualquier combinación de bits.
Delante del ordenador está la placa Velleman utililizada para la prueba. Naturalmente está conectada al puerto USB del ordenador. Por delante de la placa Velleman está la combinación de placas CABCON. La placa base se conecta a la salida digital de la placa Velleman mediante los cables de colores que vemos a la izquierda.
A al derecha vemos el tablero de vías de prueba, Como tengo sólo dos placas CABCON01 lo que he hecho es conectar dos de las vías de prueba a una de las placas y la tercera vía a la otra placa, En cada una de estas tres vías hay una locomotora, que está rodando, respondiendo a las instrucciones que emite el ordenador. Como la placa Velleman tiene dos salidas PWM se utilizan esas dos salidas para manejar independientemente la velocidad de las locomotoras. De hecho, como las dos primeras vías están conectadas a la misma placa, estas dos locomotoras se mueven al unísono, y la tercera de forma independiente. El hecho de poner las dos primeras locomotoras en paralelo, es para comprobar si se calienta demasiado algún elemento.
También se ve en la imagen, en primer término, un amperímetro que está marcando el consumo total del sistema. Aunque los números no se ven muy bien debido a que durante la exposición de la fotografía han oscilado los valores, el consumo con estas tres locomotoras rodando a bastante velocidad es alrededor de 600 mA. (lo que no quiere decir que toda esta corriente llegue a las vías, pero es una buena indicación del punto de carga del sistema de tracción que está calculado para 2 Amperios).
Por cierto, después de pelearme con la forma de montar un amperímetro (Ver Electrónica de diseño) parece que ya he conseguido enterarme de la forma correcta de hacerlo, y no me extraña que me costase trabajo, porque se requieren unos elementos muy poco habituales. En un próximo artículo comentaré el tema para el que quiera poner un amperímetro en un controlador para trenes.
Respecto del resultado de la prueba, ha sido completamente satisfactorio. Tal como esperaba, el sistema permite dirigir, cada señal de control, a cada cantón, y también cambiar el sentido de movimiento de cada cantón. Realmente la prueba es bastante complicada, ya que todo se maneja dando manualmente valores a los bits de salida desde el programa de control.
Ahora queda otra labor: Hacer que el programa de control, genere esas salidas en respuesta a los elementos de control que maneja el usuario. Hace ya tiempo que hice una programación para estas ventanas de control de locomotoras (Véase Nuevo Oficio) pero ahora me tengo que replantear toda esta parte de la programación, en parte porque algunas ideas que entonces tenía han cambiado, y en parte porque ahora es cuando ya tengo claro todo lo que el programa debe generar para manejar las placas CABCON. Lo malo de este tema es que las pruebas parciales no son demasiado significativas, ya que hasta que no esté todo el software desarrollado, y todo el sistema para los ocho cantones montado no se puede comprobar el funcionamiento real del sistema.
Habrá que tener todavía un poco de paciencia...........
Al final después de tanta placa, conexión al ordenador, software especifico de control y división de cantones de la maqueta, alimentaciones individuales para cada cantón y tanta complejidad solo podrás tener una sola locomotora funcionando sobre cada cantón de vía a la vez...me parece un esfuerzo considerable para el resultado obtenido...pero esa solo es mi modesta opinión.
ResponderEliminar