

Como ya he comentado, he estado liado con el traslado de casa. Mucha gente piensa que una mudanza no es mayor problema, puesto que "te lo hacen todo". Me gustaría a mi ver a los que piensan así, cuando se van los de la mudanza y te dejan la casa llena con más de cien cajas apiladas por las habitaciones.
Bueno poco a poco va todo entrando en cintura y voy a comenzar con la nueva maqueta inmediatamente. Sin embargo debo reconocer que no todo el retraso se debe a la mudanza sino a que me he puesto con un proyecto que me ha llevado mucho más tiempo del que pensaba.
La cosa es que hace unos meses publiqué aquí un artículo (Nuevas ideas) en el que comentaba la posibilidad de hacer un controlador para el manejo de trenes, basado en el principio de velocidad objetivo, es decir un sistema en el cual el operador utiliza los mandos para establecer una velocidad a la que desea que se desplace el tren, y el sistema acelera o frena progresivamente tendiendo a alcanzar esta velocidad, con mayor o menor rapidez en conseguirlo, en función de la simulación de inercia que queramos asignarle al tren. El hacer un controlador así, es bastante complicado, pero tiene varias ventajas: La primera evidentemente es que es la forma más parecida a la realidad, ya que los trenes (al menos los modernos) funcionan así. Sin embargo hay otra razón seguramente más importante, y es que es la única forma de hacer que el controlador pueda hacer una parada y una arrancada progresivas, por ejemplo ante una señal roja que luego cambia a verde, de manera que la arrancada acabe por devolver al tren la misma velocidad que llevaba cuando inició la parada, todo ello de forma totalmente automática.
En aquél artículo ya comenté que la forma de hacer eso era realizar un conteo de los pasos hacia arriba y hacia abajo del controlador de velocidad y compararlos con el conteo establecido por el sistema de mando, de modo que si no coinciden se suba o baje la velocidad del controlador hasta igualar ambos conteos. Una ventaja adicional es que si se muestra el conteo del control de velocidad en un display numérico, tenemos, casi gratis, un velocimetro digital en el controlador
Sin embargo, al dibujar los esquemas de un controlador así, me di cuenta de que se podía hacer un dibujo formado por una serie de mòdulos, cada uno de los cuales realizaba una tarea concreta. En aquél artículo ya aparecen alguno de estos esquemas, y se menciona que en realidad algunos de los módulos realizan funciones coincidentes con controladores más sencillos, de manera que si esa división en módulos se lleva desde ser puramente conceptual, a hacerla física, se podrían construir una familia de controladores, desde el más sencillo al más complejo, utilizando cada vez determinados módulos.
Bueno, pues aprovechando que no podía comenzar con la maqueta hasta no despejar la casa de cajas, me puse a trastear con Proteus, para tratar de diseñar una serie de módulos que en efecto permitan construir una serie de controladores con diferentes prestaciones. La cosa ha sido complicada porque en un caso así, hay que desarrollar cada módulo, no como un sistema aislado, sino teniendo en cuenta su interacción con los demás, es decir con qué otros módulos se va a comunicar y qué información va a enviar y recibir de otros módulos, teniendo en cuenta incluso que un módulo debe estar previsto para conectarse alternativamente a otros diversos, en función del controlador a construir. Y para mayor complejidad, no solo hay que establecer que conexiones hay que hacer entre unos y otros módulos sino físicamente las uniones que permitan apilar los módulos y que las conexiones se realicen mediante conectores de tipo Arduino. (Me apresuro a aclarar que estos módulos no tienen relación alguna con Arduino ni podrían conectarse a él. Simplemente se utiliza el mismo tipo de conector porque es la forma más eficaz de conectar módulos que se apilan unos sobre otros)
También me he esforzado por hacer los módulos muy compactos, de manera que cualquiera de los controladores a construir resulte de un tamaño lo más pequeño posible. De hecho los controladores que equivalen a los clásicos PWM04 y PWM06 de mi tienda tienen casi el mismo tamaño, y no solo eso sino que la disposición de mandos es coincidente de manera que puedan instalarse en las mismas cajas o en los mismos paneles, quedando con el mismo aspecto por la parte vista.
El proyecto, en este momento, contempla cuatro controladores con las siguientes características:
PWM71 Se trata de un controlador con prestaciones similares al PWM04, es decir con regulador de velocidad por potenciómetro y control de paro y sentido de marcha mediante conmutador manual de tres posiciones.

Sin embargo tiene una ventaja fundamental respecto del PWM04 y es que utiliza un chip controlador de motor del tipo L298, montado con los dos canales en paralelo, lo que en teoría permite que la potencia pueda llegar a 4 Amperios. Asi que este pequeño controlador podrá manejar varias locomotoras de N o Z y también usarse para H0.
El esquema básico de este controlador, sería como la figura adjunta. Como se ve se utilizan dos módulos: PWM7P y PWM7W. El primero es el módulo de control y el segundo es el módulo de potencia que es común para toda la familia.
En esta primera imagen ya vemos como se indica mediante flechas de colores la información que va de uno a otro módulo. Las flechas rojas indican información digital en modo TTL, y las flechas de color violeta indican conexiones de alimentación.
En la parte inferior, las flechas marrones indican la conexión de tracción a las vías. Este módulo no solo produce la corriente de tracción, sino que es el que recibe la corriente de alimentación Vs (9, 12, 0 16 V) y genera alimentación de 5 V (Vcc) para todos los demás módulos.
PWM72 Este controlado será equivalente al actual PWM06. De hecho es casi idéntico en cuanto a prestaciones ya que utiliza un control de velocidad por potenciómetro y un control de paro y sentido de marcha mediante pulsadores. Como el PWM06 ya usaba el chip L298, también en este sentido es equivalente. Además como ya he comentado la huella es idéntica así que puede utilizarse en las mismas cajas y con las mismas plantillas en un panel.

Sin embargo incorpora una novedad, y es que permite el mando mediante señales externas. Esto, que antes solo se usaba en el PWM05 aparece ahora cono standard en todos los controladores de la familia (excepto en PWM71) Se trata de unas conexiones (representadas con flechas azules) mediante puertas lógicas que permiten actuar sobre el controlador desde un dispositivo externo. Por ejemplo este controlador admite tres señales denominadas F (Adelante) S (Stop) y R (Atrás) Activando cualquiera de ellas el controlador efectúa esa función, es decir hace lo mismo que si el operador hubiera pulsado uno de los tres botones que controlan la marcha adelante, la marcha atrás o la parada. Es posible activar estas funciones con un simple interruptor que conecte la borna de la señal a tierra, asi que se pueden usar sensores de tipo red o hall situados en la vía, vías de contacto, y cualquier tipo de dispositivo de mando tales como pulsadores, conmutadores momentáneos o joystiks. Se pueden hacer por lo tanto ciertos automatismos sencillos que paren o arranquen los trenes sólo con este controlador y sensores en la vía sin necesidad de cortar carriles, ni usar relés.
PWM73 Este es un controlador semejante al antiguo PWM05, y por lo tanto es un controlador con simulación de inercia.
 Se han simplificado un poco las prestaciones del PWM05, eliminado las tres puertas de entrada y la función de parada progresiva. A cambio incorpora la potencia del chip controlador de motor L298 y también mandos integrados en el propio controlador e incluso un display que muestra la velocidad del tren. Se elimina así la necesidad de tener además un cuadro de mandos adicional, y podrá instalarse directamente en un panel, El tamaño en planta es idéntico al PWM05 por lo que se puede colocar en un panel sin ocupar un espacio excesivo.
Se han simplificado un poco las prestaciones del PWM05, eliminado las tres puertas de entrada y la función de parada progresiva. A cambio incorpora la potencia del chip controlador de motor L298 y también mandos integrados en el propio controlador e incluso un display que muestra la velocidad del tren. Se elimina así la necesidad de tener además un cuadro de mandos adicional, y podrá instalarse directamente en un panel, El tamaño en planta es idéntico al PWM05 por lo que se puede colocar en un panel sin ocupar un espacio excesivo.Análogamente al PWM72 tiene la posibilidad de mando externo mediante puertas lógicas pero ahora a las funciones F, R y S , se añaden las U (acelera) y D (decelera). Se consigue así un funcionamiento análogo al PWM05 excepto por la no existencia de la función B Dado que tiene todos los controles integrados, y además un juego completo de puertas F R S U y D independientes es equivalente a tener dos de las tres puertas del PWM05.
La posibilidad de manejar externamente todas las funciones (incluida la analógica I que ajusta la intensidad del efecto de inercia), hacen que este mando pueda colocarse oculto y manejarlo a distancia desde un panel que utilice pulsadores o incluso un joystick. Por supuesto, se mantiene la posibilidad de manejo desde sensores de tipo reed o hall, o incluso mediante una interfase digital por un programa de ordenador.
PWM74 Este es el controlador tope de gama, y evidentemente se trata de un controlador por velocidad objetivo.
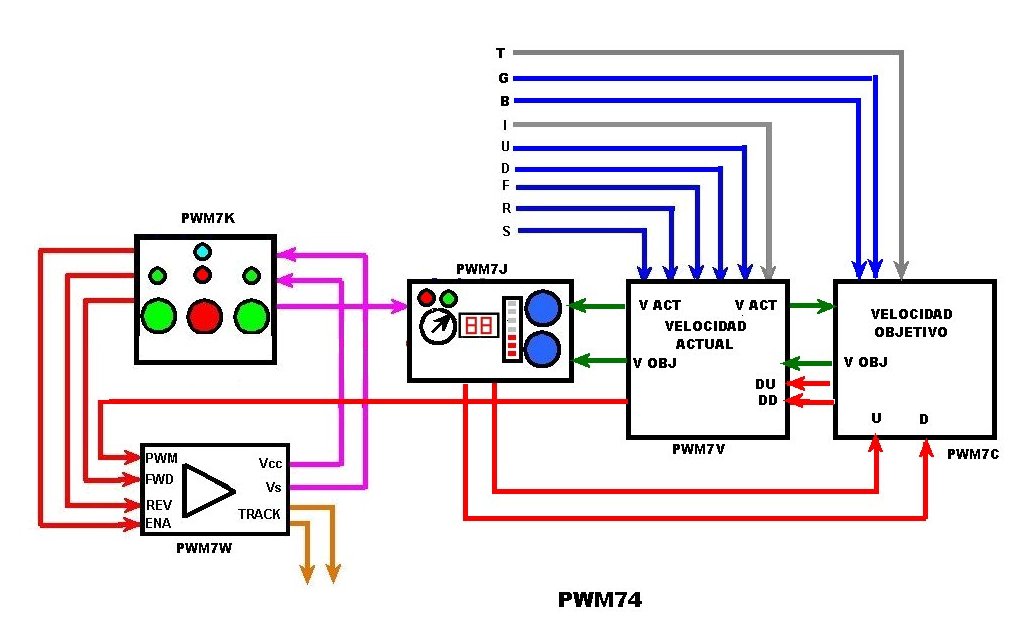
El tamaño en planta es idéntico al PWM74 asi que se sigue manteniendo contenido, aunque en este caso la profundidad es mayor, ya que tiene un módulo más. De hecho, es muy fácil convertir un PWM73 en un PWM74 ya que basta enchufar debajo del primero, un módulo PWM7C,
El panel de mandos, que es el módulo PWM7J, incluye los botones para acelerar y frenar, o más bien para subir y bajar la velocidad objetivo, y el mando para el ajuste de inercia. Además tenemos un display de dos cifras que indica la velocidad actual del tren y también un display de barras que sirve como indicador de la velocidad objetivo. Una cosa interesante es que aparecen también dos leds verde y rojo que indican el funcionamiento de las funciones de parada y arrancada progresivas, Si como es normal, estas funciones se asocian al funcionamiento de señales en la vía, estas dos luces van a reproducir en el panel la situación de esas señales, o sea, algo parecido al aviso de señales en cabina, por ejemplo del sistema ASFA Estas luces también se pueden sacar externamente para situarlas en un panel separado del controlador.
Como se puede comprobar, al final han salido siete módulos que combinados de formas distintas dan lugar a los cuatro modelos de controlador. Lo bueno del sistema es que puede seguir creciendo, de modo que por ejemplo si se desea un módulo de mayor potencia, bastaría cambiar el PWM7W por otro que tuviese la potencia requerida. Asimismo se puede pensar en otro tipo de controlador (ya estoy pensando en uno de tipo regulador por puntos, como las antiguas locomotoras eléctricas o los tranvias) y se podrían aprovechar varios de los módulos existentes.
Se comprende que diseñar todo esto ha sido muy complicado, y de hecho ha requerido muchas horas de diseño y simulación en Proteus, pero parece que ya tengo un diseño completo listo para encargar los PCB's en cuanto pase el año nuevo chino.
La imagen de la cabecera, muestra los siete módulos en una sola imagen de 3D creada por Proteus, aunque por supuesto cada módulo está diseñado en un único proyecto.