

Hace unas semanas, en el artículo "Acantonamiento electrónico" puse unos esquemas describiendo la forma en que quería organizar la alimentación de tracción de mi maqueta, implantando un sistema
de acantonamiento manejado por el programa de ordenador y controlando la tracción de los trenes mediante las señales PWM producidas por dos o más placas Velleman K8055.
Posteriormente en el artículo "COLA.02" daba cuenta del experimento realizado con varias locomotoras alimentadas por un prototipo del sistema, que resultó muy satisfactorio. Falta ahora juntar ambas ideas y diseñar la forma práctica de llevarlo a la práctica.
La idea expuesta en el primero de los artículos, es que cada unidad de control "persiga" a una determinada locomotora, y vaya cambiando de un cantón a otro según la locomotora cambia de cantón, todo ello naturalmente en base a los detectores situados en la vía, y bajo el control del programa de ordenador. Este sistema tiene la ventaja de que aunque hay ocho cantones en la maqueta, las unidades de control pueden ser menos, de manera que es válido utilizar sólo dos placas K8055, lo daría un total de cuatro señales de control
Sin embargo hay una cuestión a dilucidar: ¿donde está la divisoria entre lo que es unidad de control y lo que es cantón? El último esquema del primer artículo parecía ir en la dirección de que de cada unidad de control, llamadas "A" y "B" en aquél esquema, salía ya una corriente de tracción que mediante un hipotético conmutador se distribuía a las vías del cantón que debía recibir esa corriente en cada momento. Sin embargo ya en el texto hacía la consideración de que si este conmutador era electrónico, no podría manejar directamente la corriente de tracción, por los problemas de polaridad, intensidad, y desde luego sin llegar a pensar en la "aportación" de los dispositivos Gaugemaster
Así que hay elementos que hay que poner "aguas abajo" del Conmutador, y por lo tanto no asociados a la unidad de control, sino al cantón.
En primer lugar, desde luego, por su peligrosa actuación, los Gaugemaster deben ser el último elemento de la cadena.
Para mantener la polaridad constante en todos los circuitos electrónicos, el inversor de polaridad, debería ser también asociado al cantón, y situarse en penúltimo lugar. También podría situarse tras el Gaugemaster, pero esto haría que tuviera que conmutar la corriente ya con la frecuencia de limpieza incorporada. Ya he comentado que esto seguramente es un peligro para el relé del inversor, así que la solución de ponerlo antes evita en este caso toda complicación.
Y el tercer, peligro, o sea la intensidad relativamente importante junto con la tensión de 9V también aconsejan que que la conversión de los impulsos de PWM en corriente pulsada de tracción se haga también del lado del cantón. Yo he llamado a este último elemento "etapa de potencia" ya que en realidad es lo hace. Es un elemento que produce la corriente que alimenta los motores a partir de una corriente de 9V con un "perfil" definido por la señal PWM que recibe de la placa Velleman.
En resumidas cuentas que tiene que haber ocho etapas de potencia, más ocho inversores más ocho limpiavias asociados de manera unívoca uno a cada cantón.
Y ahora seguramente se preguntará el lector: ¿pero no habíamos quedado que las unidades de control "persiguen" a las locomotoras de cantón a cantón? ¿cómo resulta ahora que prácticamente todos los elementos que generan la corriente de tracción están asociados de manera fija uno a cada cantón?
La clave está es que ese elemento llamado "Conmutador" en el esquema (he estado tentado de llamarlo "Router") es el que envía la señal de PWM a la etapa de potencia correspondiente de manera que cuando la locomotora pasa del cantón 1 al cantón 2, si esta locomotora estaba pilotada por la señal PWM1, esta señal pasa de enviarse a la unidad de potencia del cantón 1 a enviarse a la unidad de potencia del cantón 2. Obsérvese que las señales PWM1 PWM2... en realidad actúan "pilotando" ("modulando" sería el término exacto) la unidad de potencia, de manera que la corriente de tracción tome la forma de la señal que le llega en cada momento. Hay que contemplar las salidas PWM de las placas Welleman como puramente una señal de control.
Así que como ya dije en "Acantonamiento electrónico" cuando la locomotora que venía por el cantón 1 pilotada por ejemplo por la señal PWM3, y por lo tanto estando el conmutador enviando la señal PWM3 al la etapa de potencia del cantón 1, al llegar al contacto 1, y estando libre el cantón 2, lo que ocurre es que la misma PWM3 empieza a enviarse la etapa de potencia del cantón 2. Por lo tanto aunque vengan de etapas de potencia distintas, las dos corrientes de alimentación, tanto del cantón 1 como del cantón 2 serán idénticas, incluso en fase, porque responden a la misma señal moduladora PWM3
Cuando la locomotora pasa por el contacto2, la señal PWM3 deja de enviarse al cantón 1 y continúa enviándose al cantón 2, de modo que en efecto el la "señal" PWM3 es la que en realidad persigue a la locomotora.
En realidad lo que probé en "COLA.02" era una etapa de potencia (mejor dicho dos) y si nos fijamos la etapa de potencia es un elemento "tonto" ya que no recibe directamente control por parte del ordenador. De hecho toda esta parte asociada a los cantones solo recibe órdenes del programa de ordenador para cambiar la posición de los relés inversores de polaridad.
Bueno, en vista de esto, el paso siguiente va a ser construir la etapa de potencia "octal" con sus inversores asociados. Si construyo eso ya puedo manejar mis trenes con este sistema aunque el famoso conmutador no exista, simplemente conectando de forma fija las entradas de la etapa de potencia a señales PWM de las placas. Claro que no tendré mas que cuatro señales para ocho entradas pero puedo conectar cada señal a dos etapas y ya tendré mucho más que lo que tengo ahora con un solo System Joerger
Hay una cuestión que me ha traído un poco de cabeza con este esquema: En realidad yo voy a poder manejar cuatro locomotoras independientemente, si es que utilizo solo dos placas Velleman, es decir tendré cuatro "cabinas de mando virtuales" en el programa, desde cada una de las cuales controlo la velocidad de cada una de esas cuatro locomotoras, y que en realidad estará actuando sobre cada una de las cuatro señales PWM. Parece lógico que en esas cabinas virtuales haya un mando para ir adelante o atrás, con lo que la lógica dice que los inversores de polaridad deberían ser cuatro y por lo tanto asociados de alguna forma al numero de señales de control y no al número de cantones.
Sin embargo, las etapas de potencia no son "bidireccionales", De hecho su polaridad es bastante específica porque no solamente no puede invertirse sino que el polo común a todas las salidas es el positivo, así que el cambio de polaridad hay que hacerlo después, y por lo tanto cuando el sistema ya es de ocho vías.
Estaba un poco mosca con esto hasta que me di cuenta que, que no sólo era obligado por ese motivo, sino
por otra razón:
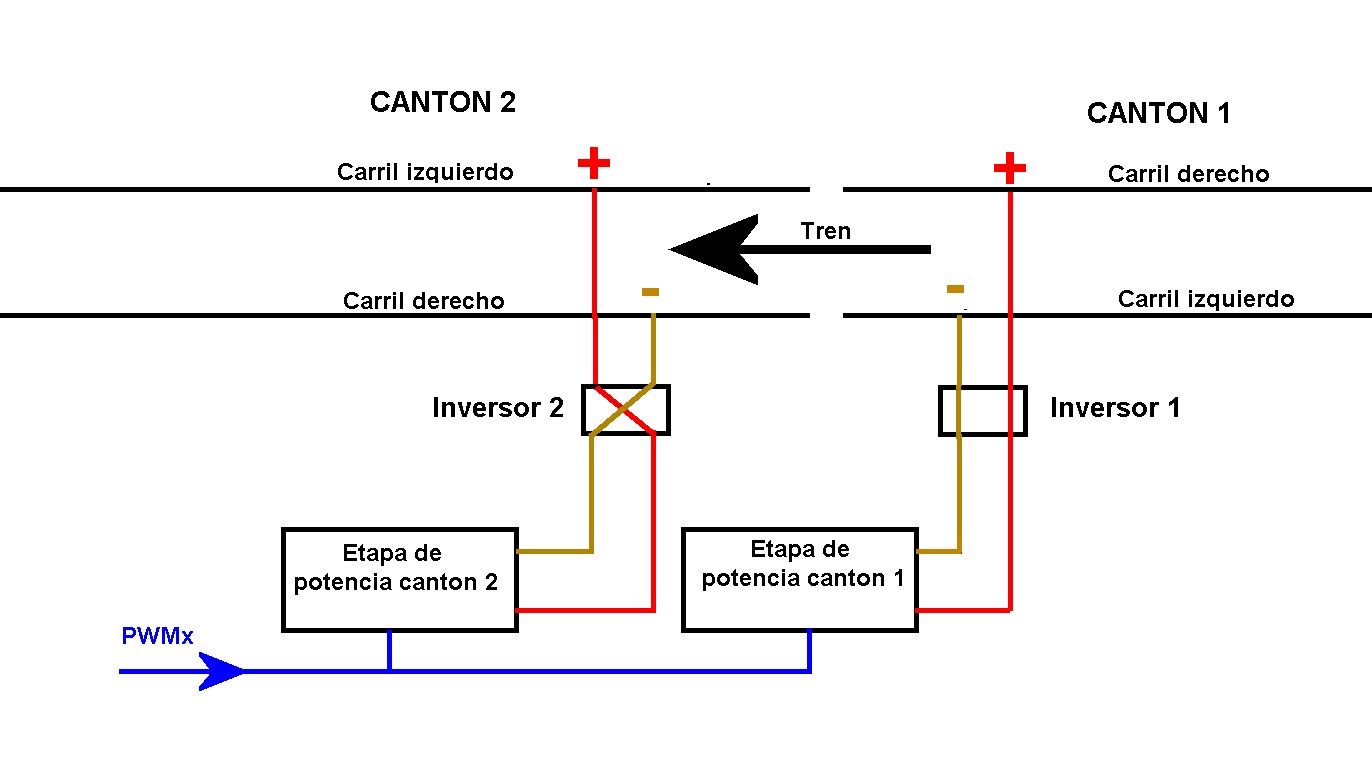
En algún punto de mi maqueta se forma uno de los famosos bucles de retorno. En ellos, como en la figura, existe un punto en el que se encuentran enfrentados el carril derecho, alimentado normalmente con el polo positivo con el carril izquierdo del cantón siguiente, y viceversa. Esto quiere decir que en esos puntos puede darse la situación de que una locomotora vaya a pasar de un cantón con una polaridad a otro cantón con la polaridad inversa. En el momento en que el "Conmutador" se ponga a alimentar con la misma señal, en este caso indicada por PWMx a las dos etapas de potencia, la corriente producida va ser igual, pero para que la locomotora pueda pasar, hay que invertir la polaridad en el segundo cantón y no en el primero, de modo que la corriente en las vías tenga el mismo sentido en ambos cantones. Es decir, la misma señal pero con una polaridad en un cantón y la contraria en el siguiente. Así que es necesario tener un inversor en cada cantón.
No hay comentarios:
Publicar un comentario
Gracias por expresar tus opiniones.
Los comentarios aparecerán en el blog normalmente en unos pocos segundos