
Hace ya bastantes meses (Nuevo Oficio), hice unos experimentos para poder comprobar si era factible hacer un control PWM para alimentar las locomotoras, regulado desde un programa de ordenador. Este elemento recibió el nombre de COLA y la verdad es que funcionó bien, aunque yo no estaba absolutamente conforme con el diseño, ya que me basé en un elemento, el potenciómetro digital DS1669-100 que resultó un tanto caprichoso. También hubo un problema al interaccionar un canal con otro, lo cual me obligó a hacer un complicado diseño con fuentes de alimentación distintas para cada cantón. Por esta razón cuando me di cuenta de que las placas de Velleman tenían dos salidas de tipo PWM, pensé que podría repensar el control de las locomotoras en base a estas salidas.
Tenía que probar si esto era factible, antes de tomar la decisión de cambiar a este nuevo sistema de control, ya que. al menos en una pequeña parte afecta al sistema de control de desvíos y demás aparatos de vía que estoy a punto de terminar. Ya comenté que la forma de conseguir controlar varias placas simultáneamente pasaba por tener abiertas varias instancias de un programa de comunicaciones cuyo funcionamiento es diferente al de las placas Micropick, así que tenía que decidir si efectivamente iba a necesitar tener activas más de una placa, y eso sólo era necesario si iba a usar el control PWM de estas placas.
Una dificultad que he encontrado es que Velleman, que explica bastante bien otros temas, no dice prácticamente nada acerca de las salidas PWM en sus manuales. Afortunadamente, en la web de Velleman hay un foro, y buscando las preguntas acerca de la placa K8055 encontré varias preguntas acerca de cómo conectar las salidas PWM para controlar motores. Tal como yo intuía , se trata de llevar la salida producida por la placa a la base de un transistor, cuya corriente de colector regula la intensidad que pasa por el motor. Sin embargo nunca está de más ver un esquema con la forma práctica de hacerlo, y en efecto, en este foro aparece este esquema varias veces.
El transistor queda un poco en el aire, pero he recordado que en el diseño del primer COLA utilicé un transistor MPSA13 que es un transistor Darlington, por tanto con una gran ganancia de corriente, así que parece que ese tipo es el apropiado. Recuerdo que hice algunas pruebas con dos locomotoras y se calentaba bastante, por lo que este transistor parecía estar muy justito. Algún lector del blog se lamentó de que si tenía algún tren con dos motores, o que si quería hacer una doble tracción, esa alimentación iba muy justa. Por este motivo he seleccionado un transistor más potente y he escogido el TIP110. Es un transistor también tipo Darlington, con 2 Amperios de corriente de colector.




Así que esta prueba, ha resultado todo un éxito, y ya no tengo duda de que voy a usar las placas Velleman, en principio dos placas, para tener el sistema de Control por Ordenador de Locomotoras Analógicas (COLA), que como se trata de una nueva versión habrá que llamar COLA.2
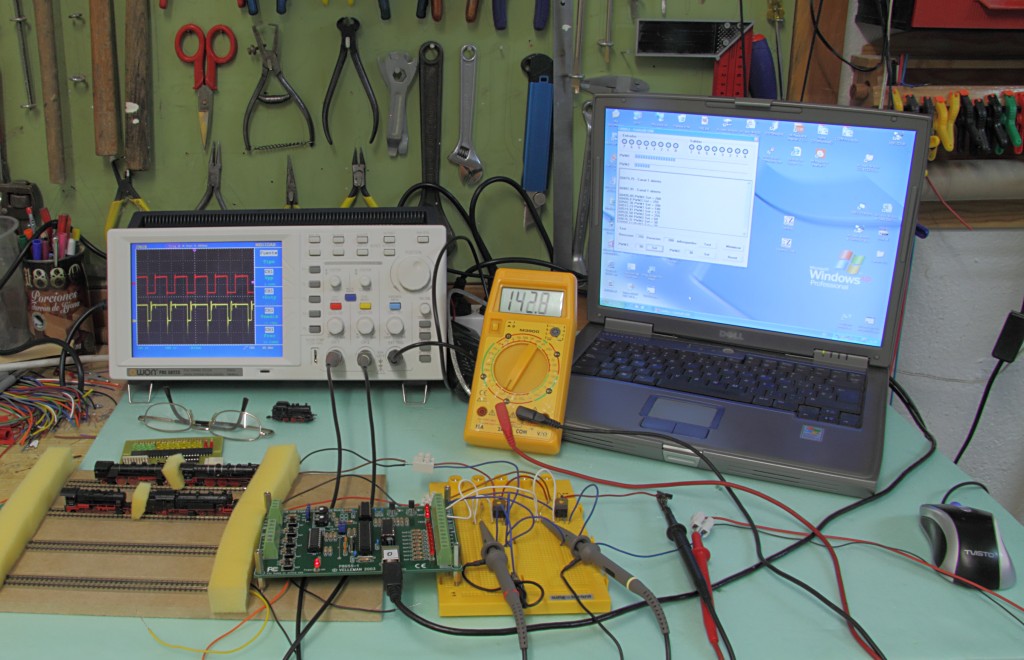
No he mencionado la misión del polímetro que se ve en las pruebas. Está controlando la intensidad que absorbe el circuito. La intención es poner algún sistema de protección para evitar que se destruya el transistor por sobrecargas o cortocircuitos, que pueden ocurrir fácilmente en las vías por caída de objetos, descarrilamientos etc.
Voy a colocar en cada circuito de alimentación un fusible térmico, para que en caso de que la intensidad supere 500 mA se abra el circuito. Como el TIP110 aguanta 2 A, espero que esta protección sea eficaz. El termofusible que he pedido es este: RKEF050
Y por cierto, he pedido también unos sensores de efecto hall......
No hay comentarios:
Publicar un comentario
Gracias por expresar tus opiniones.
Los comentarios aparecerán en el blog normalmente en unos pocos segundos