Algún lector se ha dirigido a mi, pidiendo que publicase el esquema eléctrico de la estación oculta que he venido describiendo en capítulos anteriores, porque tenía la intención de reproducirla. Seguramente piensa que para hacer todo ese cableado que se ha visto, había necesitado un preciso "plano de conexiones" Bueno, en realidad no es así, de modo que para que no parezca que quiero guardar algún secreto, he dedicado unas cuantas horas a dibujar el esquema que encabeza este artículo. Lo primero que hay que decir es que ese esquema de la cabecera no corresponde a mi estación oculta, ya que ésta tiene solo tres vías de estacionamiento. mientras que en mi maqueta hay ocho vías, así que es más del doble de lo dibujado. El objetivo de dibujar tres vías es porque de esa manera tenemos una primera vía, otra final y una intermedia, de modo que si queremos más de tres vías basta repetir el esquema de la vía intermedia tantas veces como sean necesarias, conservando el esquema de la primera y de la última que pueden tener ligeras variaciones. De esta forma cualquiera que quiera reproducir una estación oculta automatizada con este sistema lo puede hacer para cualquier número de vías, a partir de tres.
Y lo segundo que hay que decir es que como cualquiera puede apreciar a primera vista, un esquema así no sirve para nada, porque es un caos muy difícil de interpretar.
Sobre este asunto, me ha pasado muchas veces que cuando me han pedido un esquema de algún circuito, incluso en casos más sencillos, como un bloqueo automático, hay una gran tendencia, sobre todo entre principiantes a cometer dos errores garrafales.
El primero es considerar que un esquema eléctrico es un plano del circuito a construir. Hay que quitarse eso de la cabeza inmediatamente, porque un esquema indica "qué se conecta con qué" y no es una "fotografía" de los cables que indica por donde discurren los cables. De hecho, si el esquema está bien hecho, debe estar pensado par facilitar la interpretación del funcionamiento del circuito, pero no de la forma de construirlo. Por ejemplo, en la imagen siguiente:

La figura 1 muestra lo que sería un esquema de un circuito en el que se conectan tres elementos representados por los rectángulos. Ese esquema significa que hay que unir el borne A del elemento de la izquierda con el borne C y con el borne E de los de la derecha, y también que hay que unir el borne B con el borne D y con el borne F. Eso y sólo eso. No dice cómo hay que disponer los cables para hacer ese circuito, y desde luego lo que no dice es que haya que hacer unos empalmes en medio de los cables como parece sugerir el dibujo de la figura 1.
Luego, el que monta el circuito, deberá llevar unos cables de unas bornas a otras, pero llevando los cables tal como sea más conveniente o más cómodo, con tal de que se cumpla que A se une con C y E y que B se une con D y F. En las figuras 2 y 3 he dibujado unos "cables" que serían dos formas distintas de hacer lo que indica el esquema (y hay más). Si se cumple que A se une con C y E y que B se une con D y F el cableado es correcto. Nótese que en ningún caso hay un empalme en medio de un cable, ya que cada cable va de un borne a otro siempre. Y ninguna de las diversas formas posibles de hacer el cableado es, en general, mejor que otra desde el punto de vista del funcionamiento, asi que todas son válidas y en realidad el esquema representa todas esas posibilidades sin dar preferencia a ninguna. La elección de hacer un cableado u otro puede favorecer que se utilice menos cable, que sea más fácil o más cómodo hacerlo, etc, y muchas veces depende de la situación fisica de los elementos a conectar, pero no afecta al funcionamiento, y no es algo que dependa del diseñador, sino de la persona que monta el circuito. Por lo tanto que nadie espere en un esquema eléctrico un plano que le muestre como hacer el cableado.
El segundo error garrafal que cometen muchos principiantes es pretender montar todo un circuito más o menos complejo, y no probar nada hasta el final. Mi experiencia es que actuando así, lo que se consigue es que no funcione nunca, y lo peor es que no tengamos pista alguna de dónde puede estar el fallo.
Siempre hay que hacer los circuitos paso a paso, verificando después de cada etapa que tenemos el funcionamiento previsto antes de empezar con la siguiente. De esta forma si al probar una etapa, algo no funciona, ya sabemos que el fallo hay que buscarlo en lo que hayamos hecho en esa última etapa.
Sin embargo, para hacer este montaje por etapas tenemos que saber qué etapas podemos hacer y que pruebas hay que hacer y qué resultados se pueden esperar en cada prueba. Desde luego si no se tiene ni idea de cómo funciona un circuito será muy dificil planear estas etapas. pero es que para montar un circuito con alguna garantía de éxito, hay que tener una idea bastante aproximada de su funcionamiento. Intentar montar un circuito sin saber nada de su funcionamiento, suele llevar al fracaso.
Así que si queremos hacer que este artículo sirva para alguien que quiera automatizar una estación oculta con este sistema, hay que hacer otra cosa. Lo que he hecho es volver a hacer el esquema inicial pero dibujándolo por etapas. En cada etapa lo único que se va a conservar igual, es el dibujo del esquema de vías y de los módulos, tanto los BLKS03 como los DDESVIO3. Cada vez que dibuje una nueva etapa, todo el esquema de las etapas anteriores va a quedar difuminado como referencia, de manera que se vea solo claramente la parte de esquema que afecte a cada etapa.
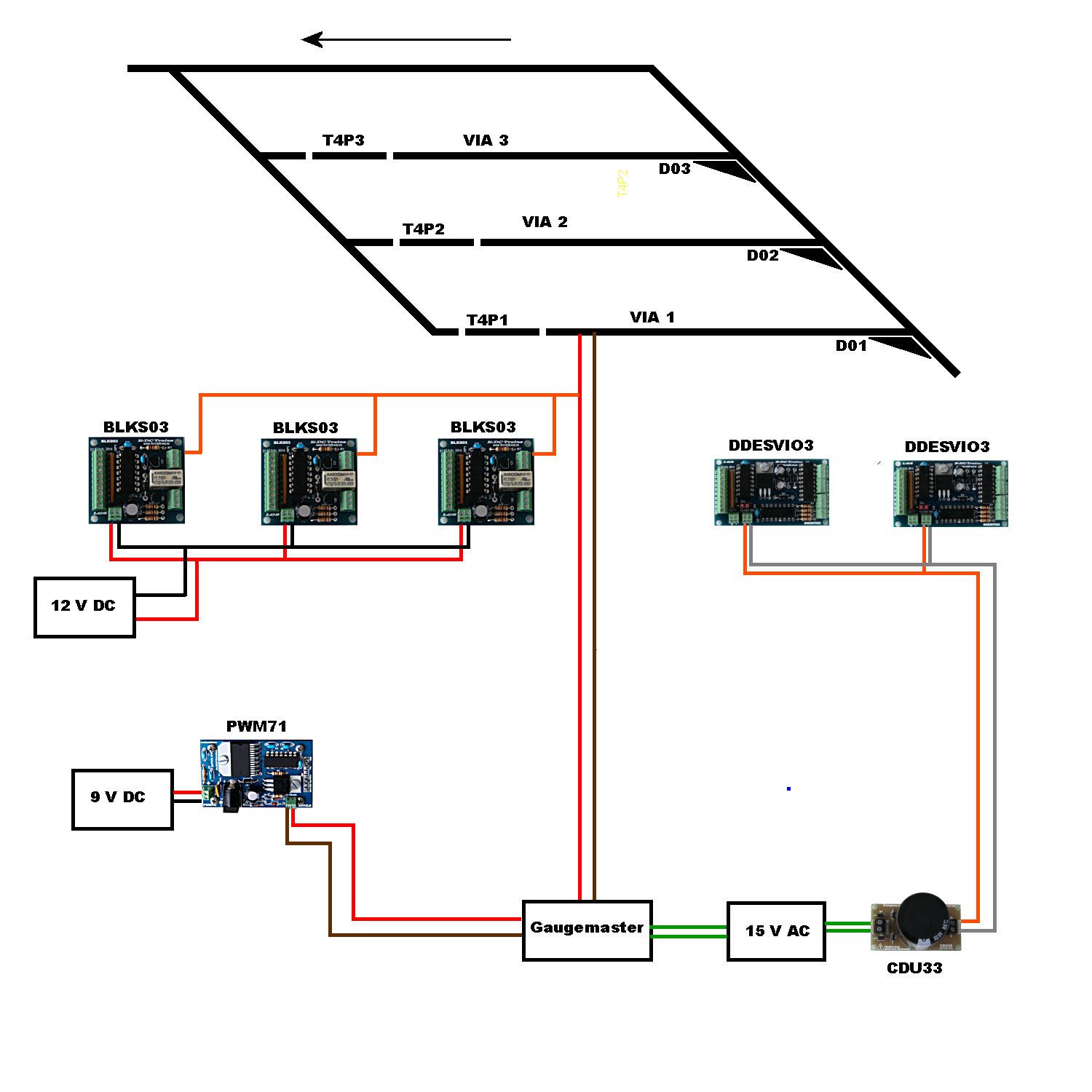
La primera etapa, representa exclusivamente las conexiones de alimentación de los distintos elementos: (Las imágenes se amplían haciendo click en ellas)
Aquí ya vemos con claridad, el esquema de vías que lleva tres vías de estacionamiento VIA 1, VIA 2 y VIA 3 más una vía de sobrepaso en la parte superior Para entrar en cada vía hay un desvío que en este caso están indicados como D01, D02, y D03. Cada vía lleva además un tramo de parada aislado rotulados como T4P1, T4P2. y T4P3.
Los desvíos de salida no se han nombrado ni se han dibujado sus motores. En realidad se trata de desvíos sin motor ya que como se circula siempre según el sentido de la flecha éstos desvíos de salida se toman siempre de talón, permitiendo que las ruedas de los trenes muevan los espadines a la posición requerida.
Podemos ver que hay una alimentación de 9 V DC que alimenta uno de los controladores de tracción PWM71 Este controlador produce corriente de tracción PWM para este circuito, que se hace pasar por un limpiavías Gaugemaster, y a partir de aquí la corriente llega a las vías (conexiones roja y marrón). También se deriva uno de los polos a los Controladores de bloque BLKS03
La alimentación de loa BLKS03 (conexiones roja y negra) proviene de una fuente de 12 V de corriente continua.
Por último hay una tercera alimentación de 15 V de corriente alterna (conexiones verdes) que alimenta, por un lado El Gaugemaster y por otro una CDU33 que genera la alimentación para los controladores de desvío DDESVIO3 (conexiones naranja y gris)
En esta primera etapa, ya hay una cosa importante que comprobar, y es que los trenes circulan por todas las vías, excepto por los tramos de parada que están aislados. Además se pueden comprobar las tensiones de alimentación con un polímetro y ver que todo está dentro de lo previsto.
En la segunda etapa conectamos los módulos de control a los elementos que queremos controlar:
Aquí vemos que cada tramo de parada recibe alimentación desde la clema superior de salida de uno de los tres módulos BLKS03. (conexiones marrón / roja / naranja) Como en la borna central de estos módulos teníamos alimentación procedente del controlador PWM71 cuando estos módulos estén en posición R los tramos de parada tendrán corriente mientras que si están en posición S no la tendrán
En la clema inferior de salida de estos módulos se ha conectado el cátodo de tres leds de color naranja La otra borna de esta clema toma la corriente de la propia alimentación del modulo a través de una resistencia que hace de resistencia limitadora para el led. Los ánodos se unen directamente al positivo de la alimentación, asi que estos leds se encienden cuando el módulo está en posición S* y se apagan en posición R.
Por la parte de los DDESVIO3, vemos que hay dos módulos para tres desvíos ya que cada uno de estos módulos puede manejar dos desvíos. Los desvíos correspondientes se unen a los módulos mediante tres cables (verde azul y gris) que corresponden a los tres cables de mando de los desvíos.
Asimismo hay dos leds amarillos por cada desvío para indicar la posición del desvío. Estos leds se conectan directamente a las salidas de señalización de los DDESVIO3
Si todo es correcto en esta etapa, se podrá comprobar que los leds se iluminan y muestran el estado de los diversos módulos.
En la etapa siguiente montamos los conmutados que permiten manejar de forma manual cada uno de los módulos, usando para este fin las primeras puertas de las clemas de entrada de cada módulo
Podemos ver tres conmutadores de tipo (on)-off-(on) conectados a las puertas S y R de cada uno de los módulos BLKS03 y asimismo otros tres conmutadores del mismo tipo conectados a las puertas AS y BS (azules) y AR y BR (verdes) de los controladores de desvíos. Se han dibujado también las conexiones de masa (GND) en color gris de todos esos conmutadores Se puede advertir que las masas de los DDESVIO3 están conectadas a las de los BLKS03 a pesar de que tienen alimentaciones distintas.
Hechas estas conexiones se puede comprobar que todo el sistema funciona bajo el mando de los conmutadores del cuadro. Eso incluye el manejo de los desvíos y el arranque y parada de los trenes en los tramos de parada, así como las indicaciones luminosas en el cuadro. En el vídeo del artículo anterior a éste hay una extensa prueba con una locomotora circulado bajo el control manual que corresponde a las pruebas realizadas al finalizar esta etapa.
La siguiente etapa consiste en montar el control automático. Para eso necesitamos poner los sensores, que en este caso son dos sensores de efecto Hall en cada vía de estacionamiento, justamente delante y detrás de cada tramo de parada. Como los sensores Hall llevan tres cables y hay un total de 6 sensores esta etapa supone una complicación brusca del esquema, que pasa atener el aspecto siguiente:
En realidad lo que complica la imagen son las conexiones de alimentación de los sensores, ya que a cada uno de ellos llega una conexión de masa (gris) y otra conexión de alimentación (azul) mientras que ellos producen las salidas correspondientes (marrón, rojo, naranja)
Nótese que los Hall llevan alimentación desde la fuente de 12 Voltios, y además hay un interruptor con un led azul de señalización, que permite cortar la alimentación de todos los sensores. Si cortamos este interruptor los sensores dejan de funcionar, y por tanto se para el sistema automático de la estación.
Para que se vea más clara la conexión de los sensores he dejado un dibujo con solo las conexiones de salida de los dos sensores Hall de la VIA2:
Cuando un tren llega por el desvío de entrada a una de las vías de estacionamiento en este caso VIA2 es porque el desvío de entrada a esa vía está en posición desviada (DDESVIO3 en posición S) al final de la vía de estacionamiento la locomotora activa el primero de los sensores, en este caso H2A. Este sensor, (conexiones rojas) actúa sobre:
- El control del desvío de entrada a la vía. En este caso actúa sobre la puerta AS del controlador del desvio D02. Con esto el desvío pasa a la posición recta lo que impide que entre un segúndo tren a esta vía.
- El control del tramo de parada T4P2 que pasa la posición S con eso el tramo de parada se queda sin tensión y el tren se detiene al final de la vía de estacionamiento
- El control del tramo de parada T4P3 o sea el de la vía siguiente a la que había entrado el tren. Este control pasa a la posición R con lo cual si había un tren en esa vía, arrancará y saldrá hacia la vía de salida.
Justo antes de salir, el tren actúa sobre el segundo sensor, en este caso sería H3B. Esta activación a la salida de un tren (conexión violeta para el caso de la (VIA2) lo que hace es poner el desvío de entada de la vía que queda libre por la salida de un tren, a la posición desviada, de manera que un tren que llegue por la vía de entrada, se meterá por el primer desvío que corresponda a una vía no ocupada
Naturalmente la ocupación de la última vía produce salida del tren que pudiese haber en la primera vìa
Superponiendo todas estas imágenes obtenemos la imagen de la cabecera de este artículo, pero no cabe duda de que la forma correcta tanto para entender el funcionamiento como para realizar el montaje es seguir las etapas que aquí se han dado, Si se compara lo aquí expuesto con los vídeos de los artículos anteriores, se podrá ver que el montaje y las pruebas se han hecho siguiendo este guión.
Al principio de este artículo, decía que no tenía ningún esquema cuando he ido montando la instalación de mi estación oculta, y es que realmente no hace falta. Ya he comentado que la misión de un esquema, es mostrar qué debe conectarse con qué, de manera que si uno tiene clara esa información no necesita ninguna imagen gráfica. Y realmente para decir qué hay que conectar con qué un gráfico no es precisamente la mejor forma
Al principio de este artículo puse un sencillo esquema que mostraba las conexiones entre tres dispositivos, uno situado a la izquierda y los otros a la derecha, cada uno con dos bornas de conexión. Pero la misma información la tenemos si hacemos una tabla como esta:
De hecho, una tabla de este estilo contiene más información que la imagen original. Ahora ya sabemos que el dispositivo de la izquierda se llama "1" y los de la derecha se llaman "2" y "3". Se puede comprobar que todo lo que necesitamos para realizar ese circuito lo tenemos perfectamente claro y resumido en esta tabla, y además si queremos añadir más información, como por ejemplo una identificación a cada conexión podemos añadir otra columna, y todas las que necesitemos. Estas tablas se realizan muy fácilmente con una aplicación como EXCEL y son muy prácticas para definir o documentar un cableado.
Ojo, que como dije al principio un esquema es lo adecuado para mostrar el funcionamiento de un circuito. En nuestro ejemplo en la imagen número 1 de la figura se ve al primer golpe de vista que la borna A se comunica con C y E lo cual no es tan evidente en la tabla. En definitiva, cada forma de representación tiene sus ventajas y sus inconvenientes para una u otra función: Para entender el funcionamiento del circuito es imprescindible el esquema. En cambio para servir de guía durante el montaje y sobre todo para conservarlo como documentación de cómo está hecho un cableado, lo mejor es una tabla.
Como ejemplo se puede ver a continuación un fragmento del Excel que recoge el cableado de mi maqueta, concretamente aquí vemos una parte de las conexiones de los sensores Hall
Esta tabla la voy rellenando según hago el cableado, De esta forma, sin necesidad de un esquema, puedo ir dejando una referencia muy útil sobre todo de cara a futuras modificaciones o reparaciones.
---------------------------------------------------------
* En los módulos comandados por señales electrónicas, como es en este caso los DDESVIO3 y los BLKS03 se habla de dos "estados" identificados con las letras R y S que proceden de las palabras inglesas Set y Reset.
En el estado "R" indicamos que el equipo que controlamos está en posición normal. Por ejemplo en un desvío sería la posición recta, en un control de bloqueo la posición que permite circular los trenes, en un semáforo la posición de vía libre, etc. Por el contrario la posición "S" indica la situación alterada, por ejemplo desvío en posición en curva, tramo de parada cortado, semáforo en rojo etc.
Las señales de control cambian de una a otra posición estos elementos. Por ejemplo un sensor que se activa y está conectado a una puerta "S" pone al módulo en posición "S" y por el contrario si activamos un sensor conectado a una puerta "R" el módulo pasará a la posición "R" Como consecuencia el elemento manejado por el control, ya sea semáforo, desvío, etc se moverá a posición correspondiente.
No hay que perder de vista que la definición de cual es la posición S y cual es la R del elemento manejado depende de nuestra conveniencia. Si por ejemplo en un desvío queremos que la posición normal, o sea la R, sea con el desvío en posición desviado. bastará intercambiar las conexiones del desvío a su controlador para que esto sea así.